-

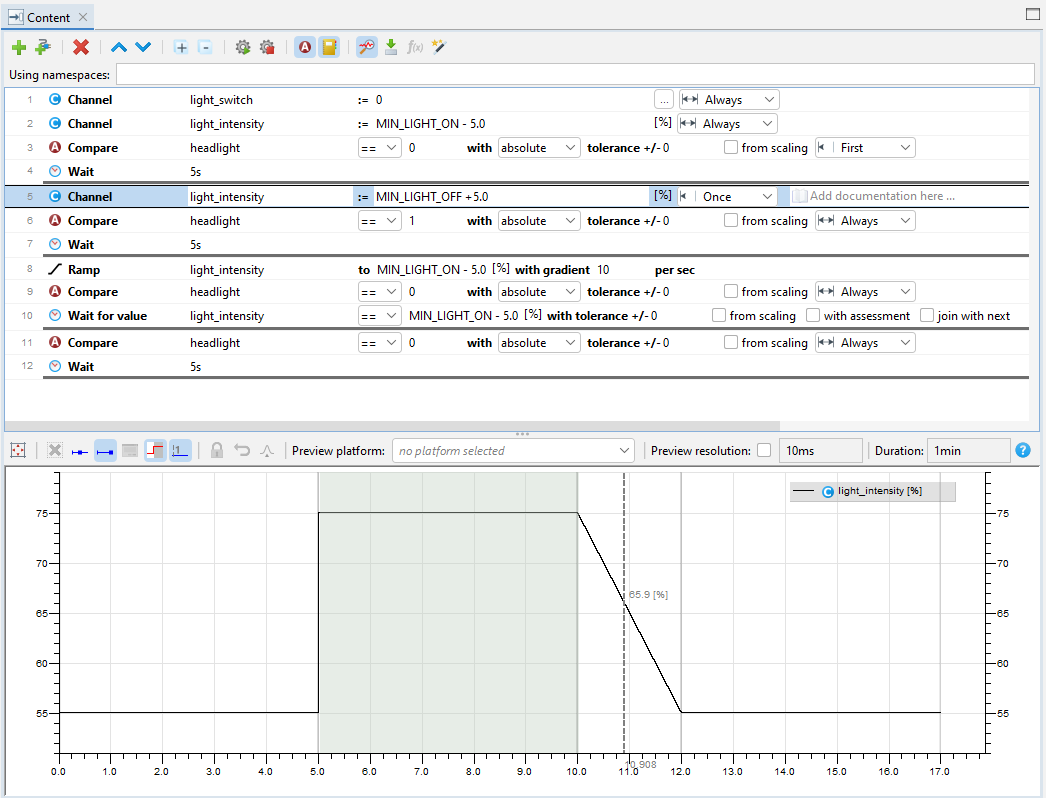
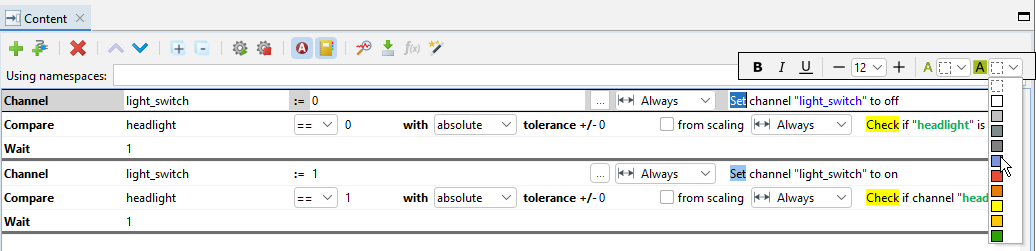
- You use the Compare Step to check if a condition is true. Here: when the light_switch is set to “on”, check if the headlight is “on” too.
-
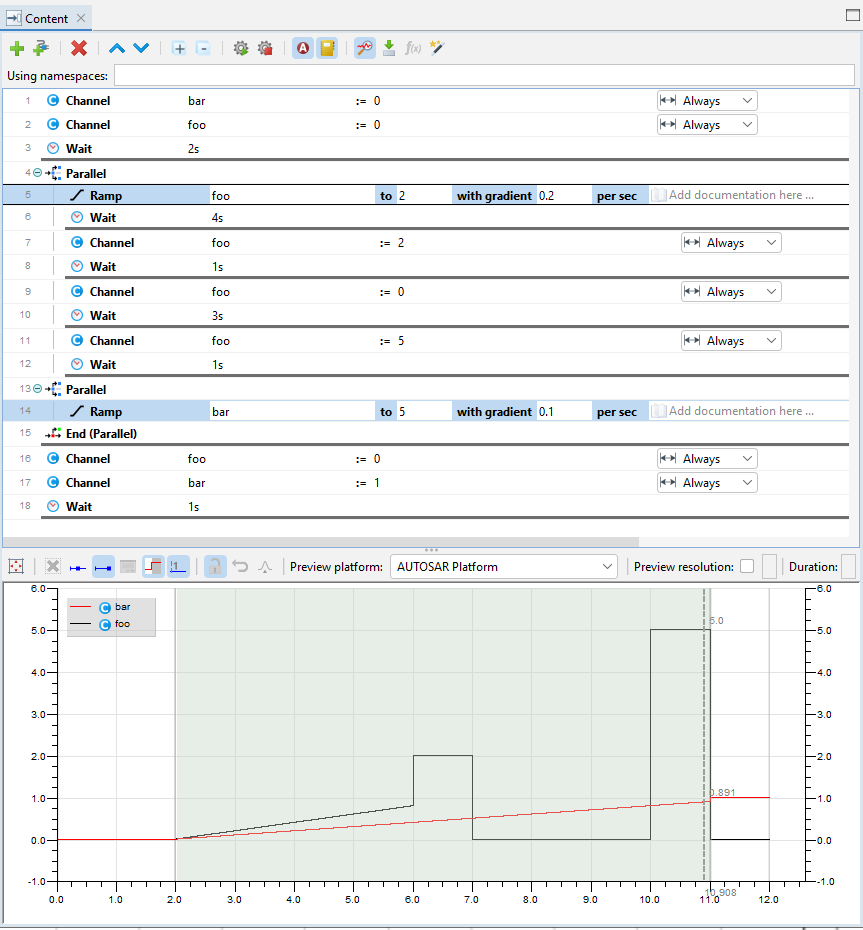
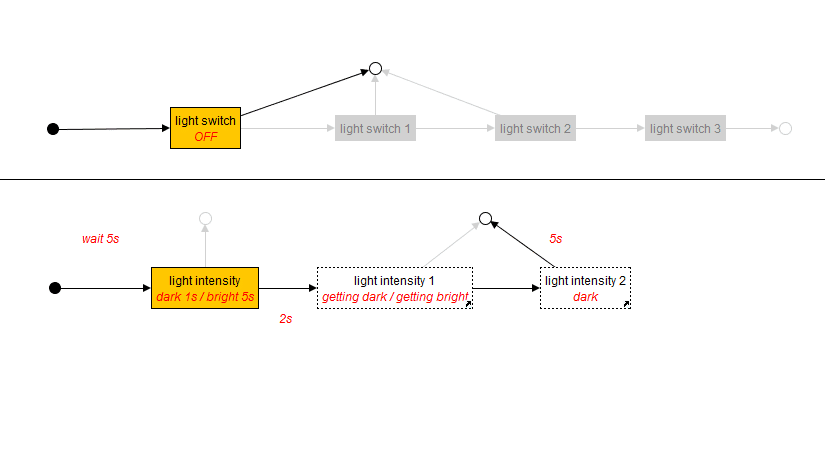
- You can run test steps simultaneously.This feature complies with the parallel automatons in the graphical test modeling.
-
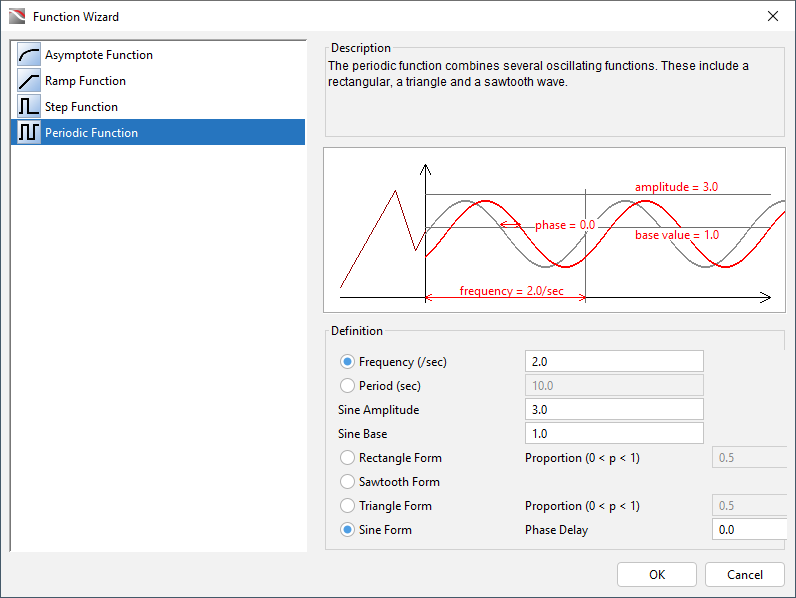
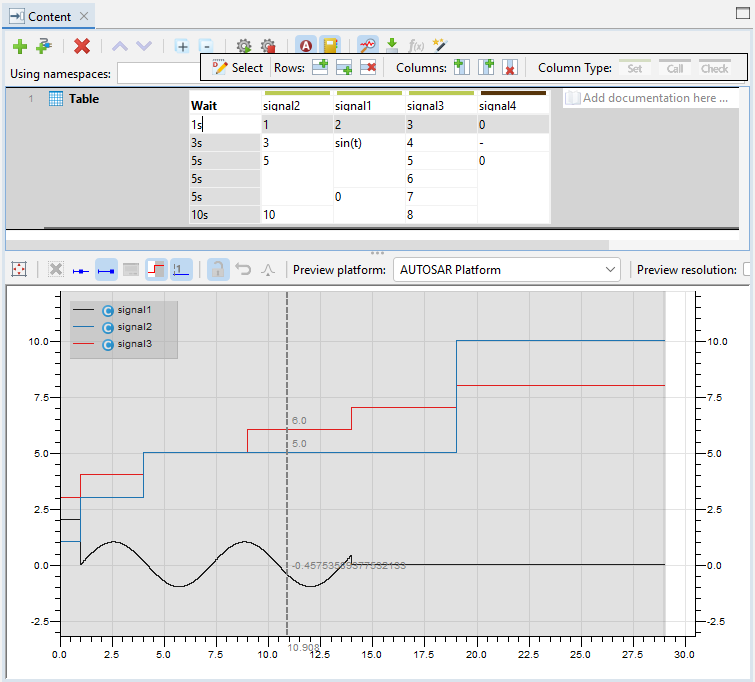
- You can set up direct definitions as a single-line mathematical formula. Or you use the convenient Direct Definition Function Wizard.
-
- Simple table step in a test step list.
-
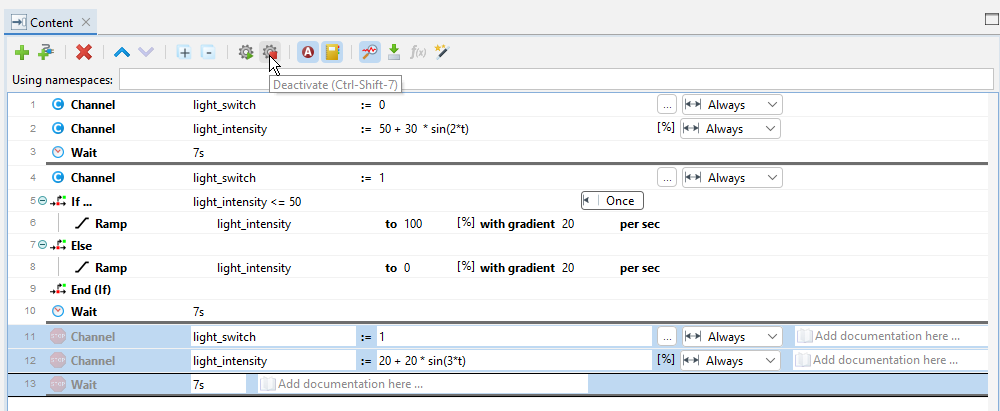
- You can deactivate test steps in a test step list to exclude them from the test execution. You can, of course, activate them again easily.
-
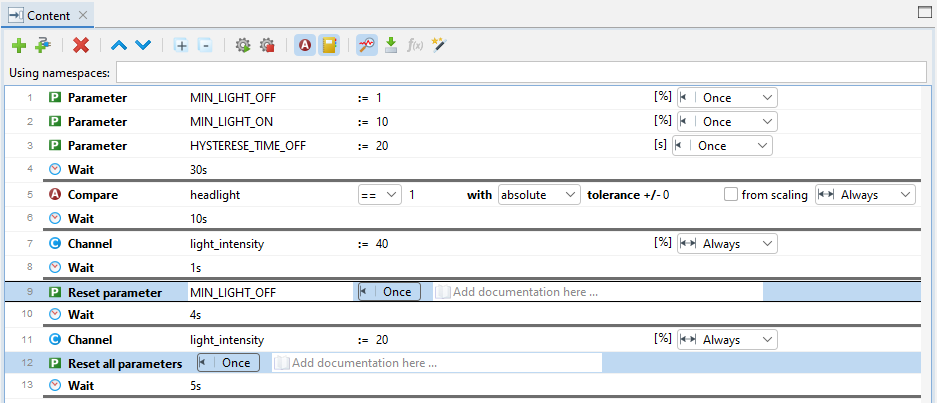
- Inside a test step list, you can change parameter values, as well as reset single parameters or all parameters to their default value.
-
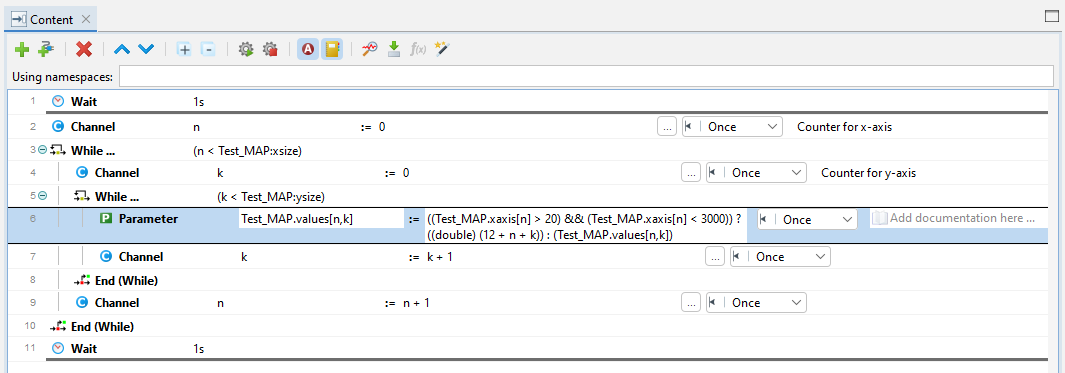
- You can nest While steps inside a test step list.
-

- You can comment your test steps.
-
- Modeling test phases with TPT

-
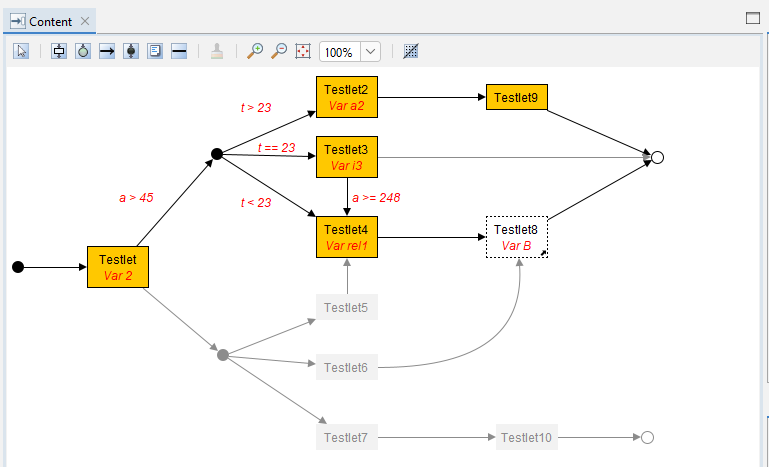
- Hierarchical automaton
-
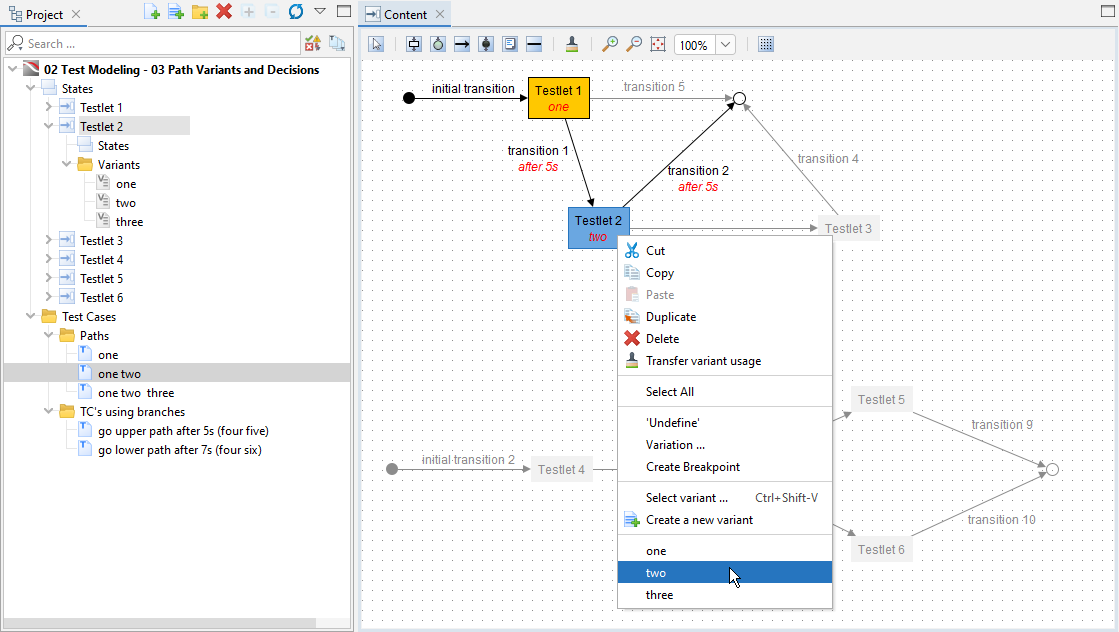
- TPT test modeling as parallel automaton with active paths in black and inactive paths grey.
-
- You can set up variants of states and transitions. With these variants, you can effectively and easily create test case variations.